视频聚合搜索 - 壹搜网为您找到"
开源机器人github
"相关结果机器人圈重磅!OpenArmX VLA正式全球开源
机器人开发的小伙伴速来!基于ROS2的双臂协作机器人平台OpenArmX VLA全量开源上线,工业级生态直接拉满,这波技术福利直接拉满! 不管是运动控制、同构遥操这类基础开发,还是VR遥操、外骨骼遥操这类高阶玩法,GitHub上全套开源项目包直接自取,上手就能开发 ...
www.bilibili.com


比AutoGPT强10倍?油管美女博主实测 GitHub Trending 榜单第一:MetaGPT
【已获原作者转发授权】 作者主页:https://www.youtube.com/@jojojoy 本期笔记:https://luminous-mapusaurus-1aa.notion.site/MetaGPT-e25c0e7bb89e42a0872874d981a6a521 原视频链接:https://www.youtube.com/watch?v=Bp95b8yIH5c&t=3s《一个提示词写游戏 Flappy bird, 比AutoGPT强10倍的MetaGPT,最接近AGI的AI项目=一个软件公
www.bilibili.com

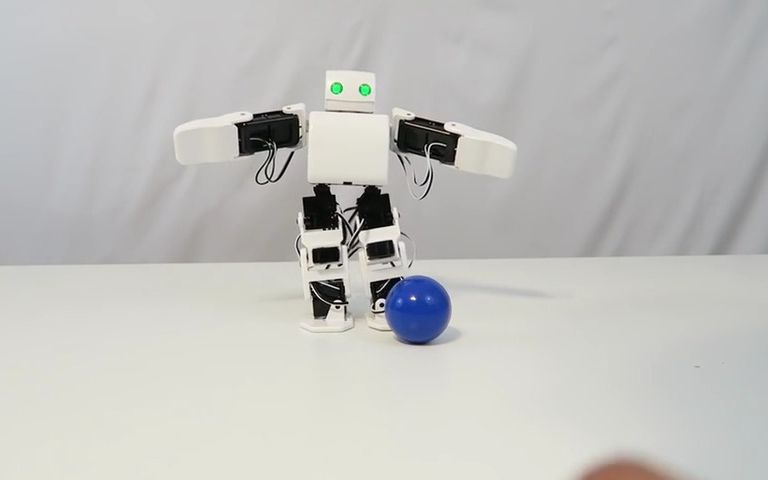
国外开源人形机器人PLEN2
https://www.youtube.com/watch?v=0R4U8iCmMJI 国外开源人形机器人PLEN2,3d打印文件、arduino代码、手机客户端上位机全都开源 开源地址:https://github.com/plenprojectcompany/PLEN2
www.bilibili.com
玩OpenClaw卡壳?试试LangTARS插件!LangBot一键部署+国产模型+沙盒安全+多平台支持,属于你的真正桌面智能机器人!
LangTARS 是 LangBot 生态里最像 OpenClaw 的"爪子"插件,能让你的 AI 机器人真正操控电脑、浏览器自动化、文件操作、shell 命令,像《星际穿越》里的 TARS 一样忠诚执行任务。 最香的是:全程免费开源、本地优先、 5 分钟搞定,QQ/微信/飞书/钉钉 ...
www.bilibili.com


MIT最新开源|野外环境下,机器人的风险感知运动规划!
这项工作引入了一种新的可穿越性概率表示,即机器人动力学模型中基于地形特征的参数分布。该模型是通过在在线识别的参数上拟合概率分布以自我监督的方式学习的,该参数被编码为以地形特征为输入的神经网络。然后,这项工作提出了两种风险感知规划算法,它们利用学习的可穿越性模型来规划风险感知轨迹。最后,基于高斯混合模型,提出了一种基于训练数据的不熟悉地形检测方法。实验表明,该方法在代表性导航任务的成功率和完成时间方面均优于假定标称或预期机器人动力学的现有工作。此外,当建议的方法部署在一个看不见的环境中时,在规划期间排除不熟悉的地形会提高成功率。 论文地址:https://arxiv.org/pdf/2210.00153.pdf 代码地址:https://github.com/mit-acl/mppi_numba
www.bilibili.com