视频聚合搜索 - 壹搜网为您找到"
开源机器人github
"相关结果


AI小智+人形机器人=用嘴开高达!
AI小智+人形机器人=用嘴开高达!基于开源硬件AI小智,和高擎机电双足人形机器人小派,实现大模型实时语音交互,控制机器人:站起、踏步、左转、右转、前进、后退、扭腰。让AI理解人类复杂指令,回复拟人情感音色,精准触发对应动作。AI小智Github开源地址:https://github.com/78/xiaozhi-esp32AI小智硬件版本:土豆子, 视频播放量 26050、弹幕量 10、点赞数 655、投硬币枚数 118、收藏人数 361、转发人数 236, 视频作者 同济子豪兄, 作者简介 私信课题方向,帮你分析规划/想创新点/摇导师/找数据集/找论文期刊,相关视频:【已开源】AI小智 Moss版,感谢虾哥开源服务器。实现 视觉识别、 IOT设备控制、MCP电脑控制。,[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介),【立创开发板小智AI训练营】流浪地球 550W/MOSS 小智AI智能中枢,当我跟 AI 说,你妈跟她男朋友跑了,小智加入视觉,检测到人脸后主动打招呼,小智项目终极版(目前全网最强)专属贾维斯感谢大佬开源!,AI小狗详细教程,[开源]适合新手的小智AI教程,简单低成本,手把手教你复刻AI小智,我们成功了!把多模态大模型和机械臂结合到一起,效果很惊艳!
www.bilibili.com

【开源】【RA-L'25】NavRL:基于强化学习的移动机器人无人机自主导航和避障
本项目已经开源,希望大家多多star支持! GitHub Link:https://github.com/Zhefan-Xu/NavRL Zhefan Xu, Xinming Han, Haoyu Shen, Hanyu Jin, and Kenji Shimada, "NavRL: Learning Safe Flight in Dynamic Environments”, IEEE Robotics and Automation Letters (RA-L), 2025.
www.bilibili.com


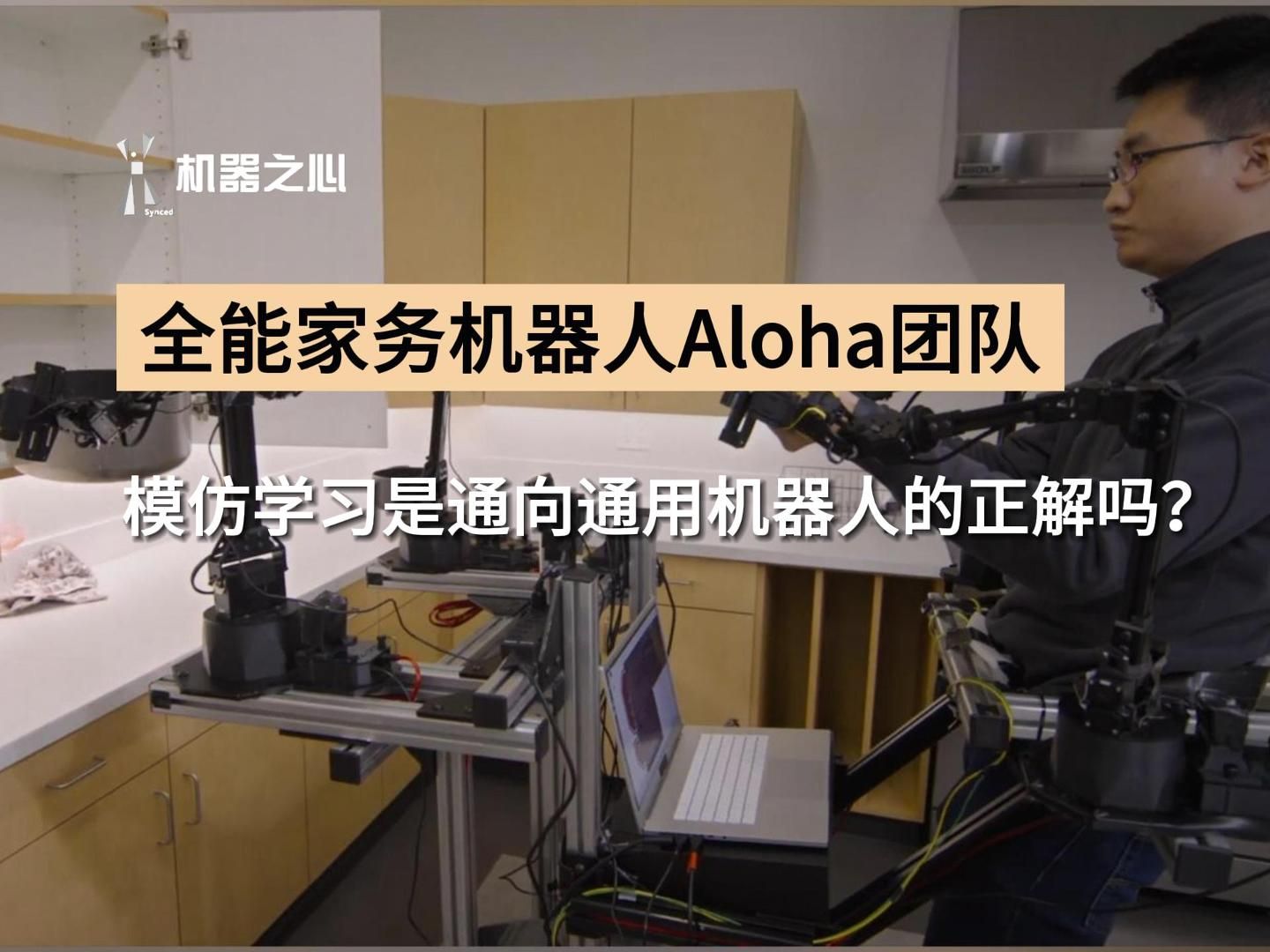
全能家务机器人Aloha团队:模仿学习是通向通用机器人的正解吗?
还记得刷遍全网的全能家务机器人Mobile Aloha吗?近期,Mobile Aloha背后的三位论文作者:Zipeng Fu ,Tony Z. Zhao和Chelsea Finn在斯坦福的宣传片中讲述了该项目的研究理念。Mobile Aloha机器项目已开源,项目链接:https://mobile-aloha.github.io/
www.bilibili.com


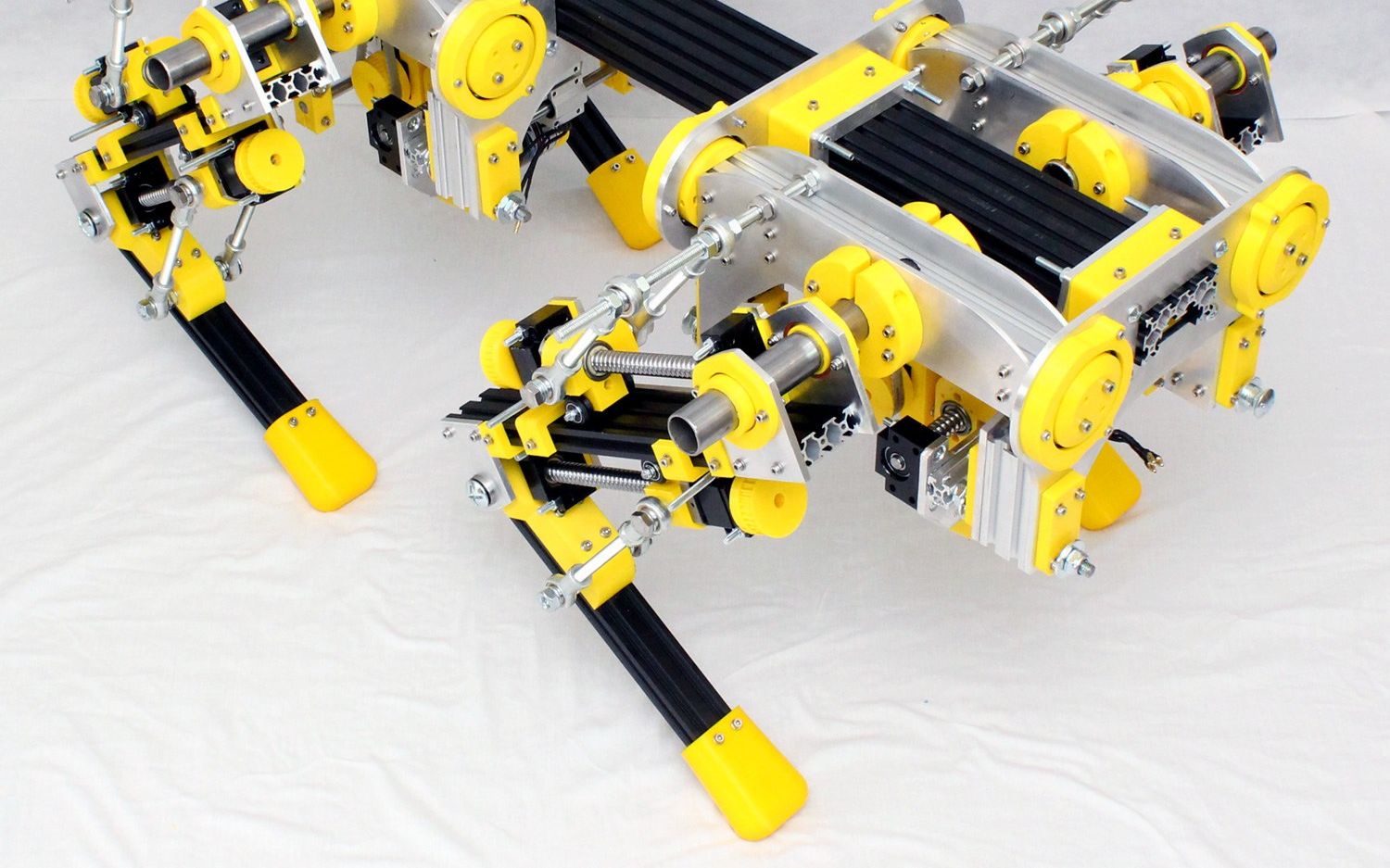
【四足机器人教程6】openDog Dog Robot 6 _ Putting the Legs On _ ...
https://www.youtube.com/watch?v=1Br-3PxwsygopenDog开源硬件第6部分。用CNC机器用铝板和滚珠丝杠和无刷电机制造支腿和执行器部件,并将这些部件与3D打印部件组合在一起,制成主要的openDog组件,您可以获得CAD和代码:https://github.com/XRobots/openDog/, 视频播放量 861、弹幕量 0、点赞数 3、投硬币枚数 1、收藏人数 16、转发人数 12, 视频作者 塔罗哦, 作者简介 ,相关视频:【四足机器人教程7】openDog Dog Robot #7 _ Electronics Installation _ James Bruton,【四足机器人】pybullet仿真-足端轨迹显示,【四足机器人】足端轨迹规划-摆线轨迹,【四足机器人】pybullet仿真-MPC控制框架-通用性测试,【四足机器人教程8】openDog Dog Robot #8 _ First Motions _ James Bruton,四足机器人 mini cheetah 动态调整离地高度,【3d打印】摆线减速,【强化学习】2048不是我的极限,【四足机器人】pybullet仿真-坡度行走-MPC控制,[四足机器人]动态调整仿真测试
www.bilibili.com