视频聚合搜索 - 壹搜网为您找到"
开源机器人github
"相关结果
免费的开源下载神器,目前GitHub星标已经达到50K,支持HTTP/BT/磁力链等9种协议的下载,支持多线程满速下载。一键抓取网页视频/图片,完全免费
Motrix是开源下载神器,目前GitHub星标已经达到50K,它支持HTTP/BT/磁力链等9种协议的下载,支持多线程满速下载。一键抓取网页视频/图片,简洁高颜值界面,完全免费。视频、音频、压缩包、图片,什么文件都能秒下!复制链接粘贴进去,Motrix 自动识别文件类型,64 分片瞬间启动!普通浏览器就像单车道堵车,Motrix 直接给你开通 64 车道高速公路!每个分片独立抢占带宽,这就是多线程并发的恐怖威力!
www.bilibili.com
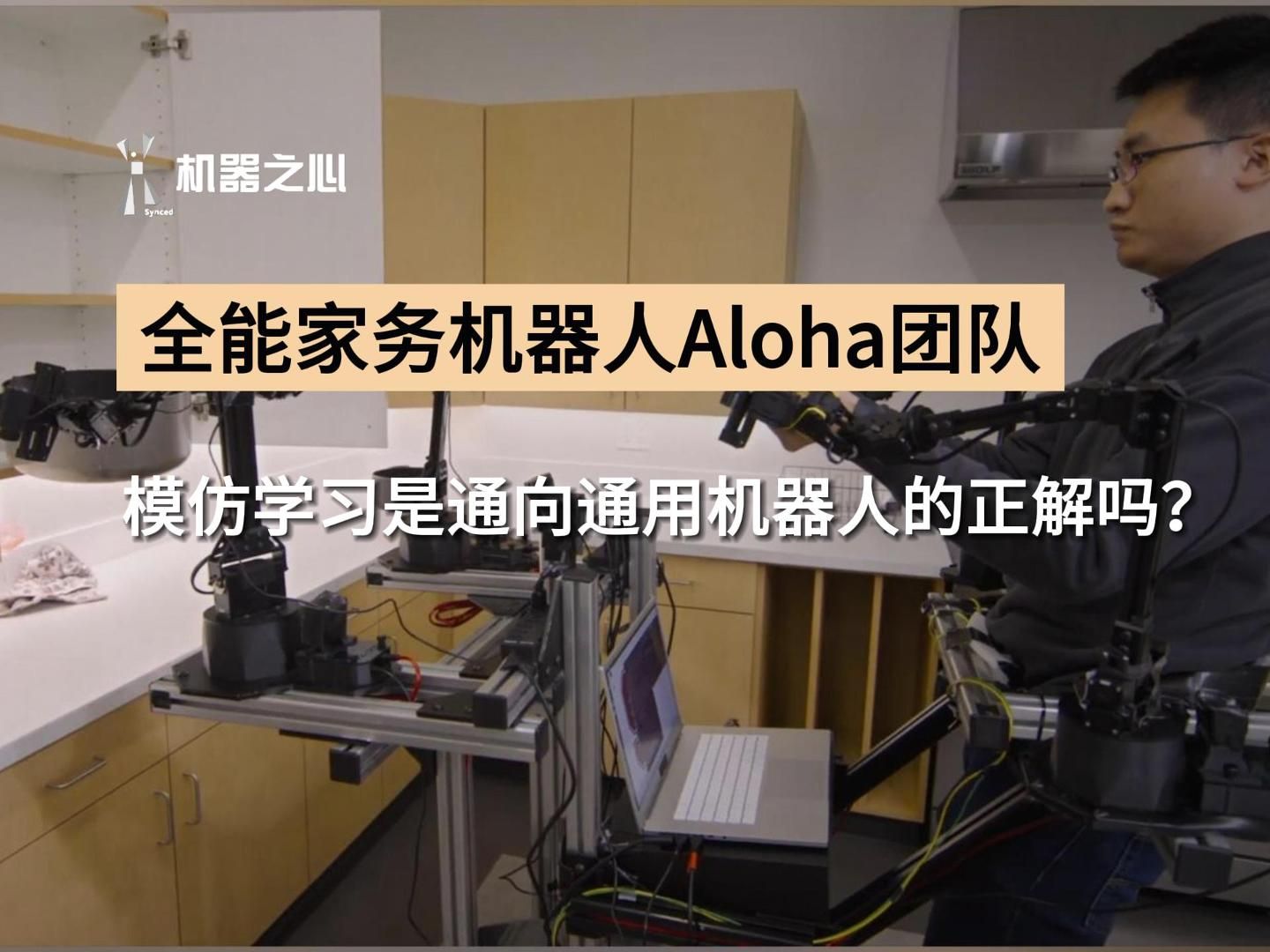
全能家务机器人Aloha团队:模仿学习是通向通用机器人的正解吗?
还记得刷遍全网的全能家务机器人Mobile Aloha吗?近期,Mobile Aloha背后的三位论文作者:Zipeng Fu ,Tony Z. Zhao和Chelsea Finn在斯坦福的宣传片中讲述了该项目的研究理念。Mobile Aloha机器项目已开源,项目链接:https://mobile-aloha.github.io/
www.bilibili.com

【9个实战项目教程】学完江科大STM32后必看,含FreeRTOS项目和基础教学/LORA/单片机/物联网/智能垃圾桶/环境监测/领绿学长/江协科技/正点原子
持续更新STM32项目视频教程。学不会,有问题没人回答,学长提供提供一对一直播辅导。
www.bilibili.com
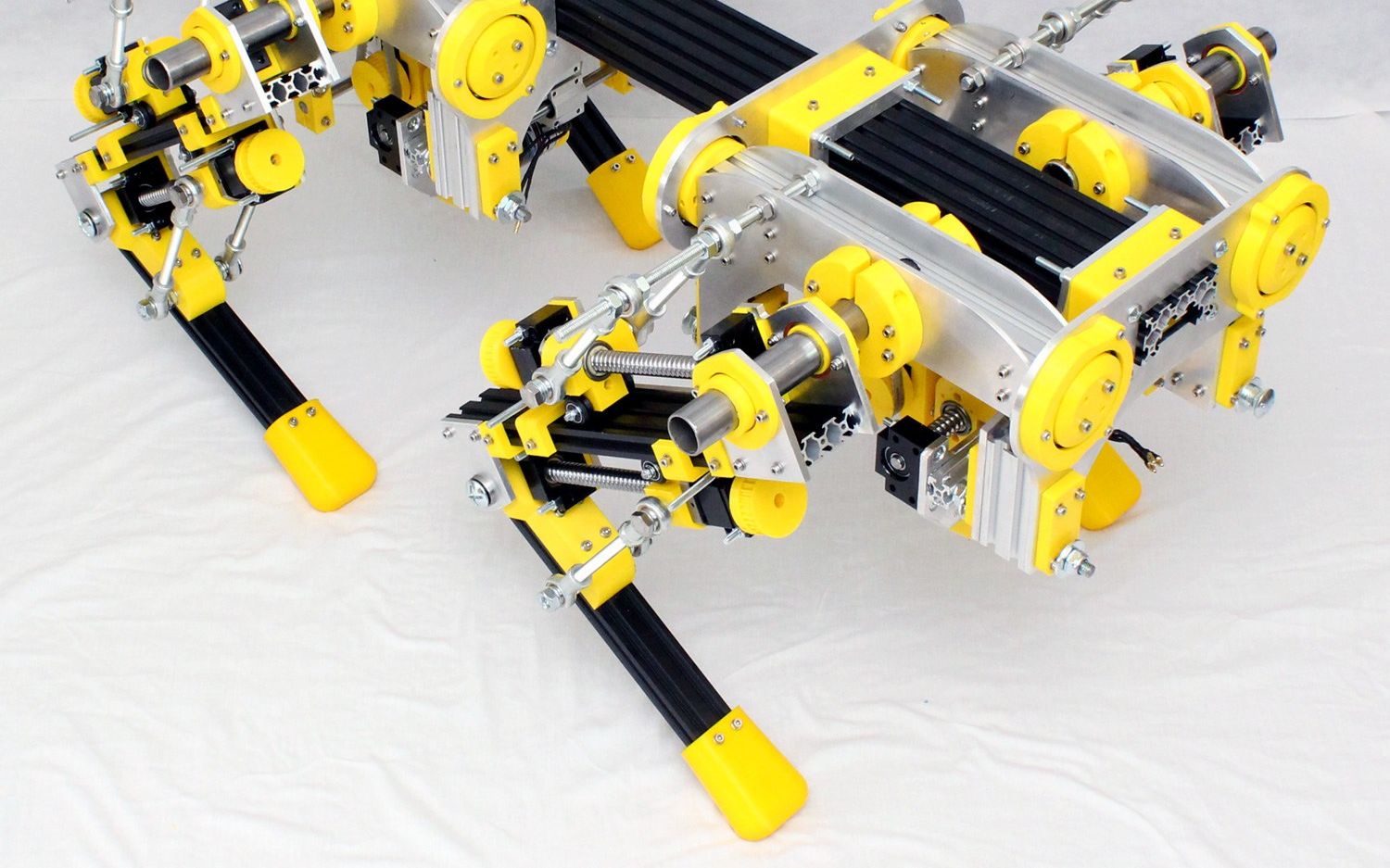
【四足机器人教程6】openDog Dog Robot 6 _ Putting the Legs On _ ...
https://www.youtube.com/watch?v=1Br-3PxwsygopenDog开源硬件第6部分。用CNC机器用铝板和滚珠丝杠和无刷电机制造支腿和执行器部件,并将这些部件与3D打印部件组合在一起,制成主要的openDog组件,您可以获得CAD和代码:https://github.com/XRobots/openDog/, 视频播放量 861、弹幕量 0、点赞数 3、投硬币枚数 1、收藏人数 16、转发人数 12, 视频作者 塔罗哦, 作者简介 ,相关视频:【四足机器人教程7】openDog Dog Robot #7 _ Electronics Installation _ James Bruton,【四足机器人】pybullet仿真-足端轨迹显示,【四足机器人】足端轨迹规划-摆线轨迹,【四足机器人】pybullet仿真-MPC控制框架-通用性测试,【四足机器人教程8】openDog Dog Robot #8 _ First Motions _ James Bruton,四足机器人 mini cheetah 动态调整离地高度,【3d打印】摆线减速,【强化学习】2048不是我的极限,【四足机器人】pybullet仿真-坡度行走-MPC控制,[四足机器人]动态调整仿真测试
www.bilibili.com

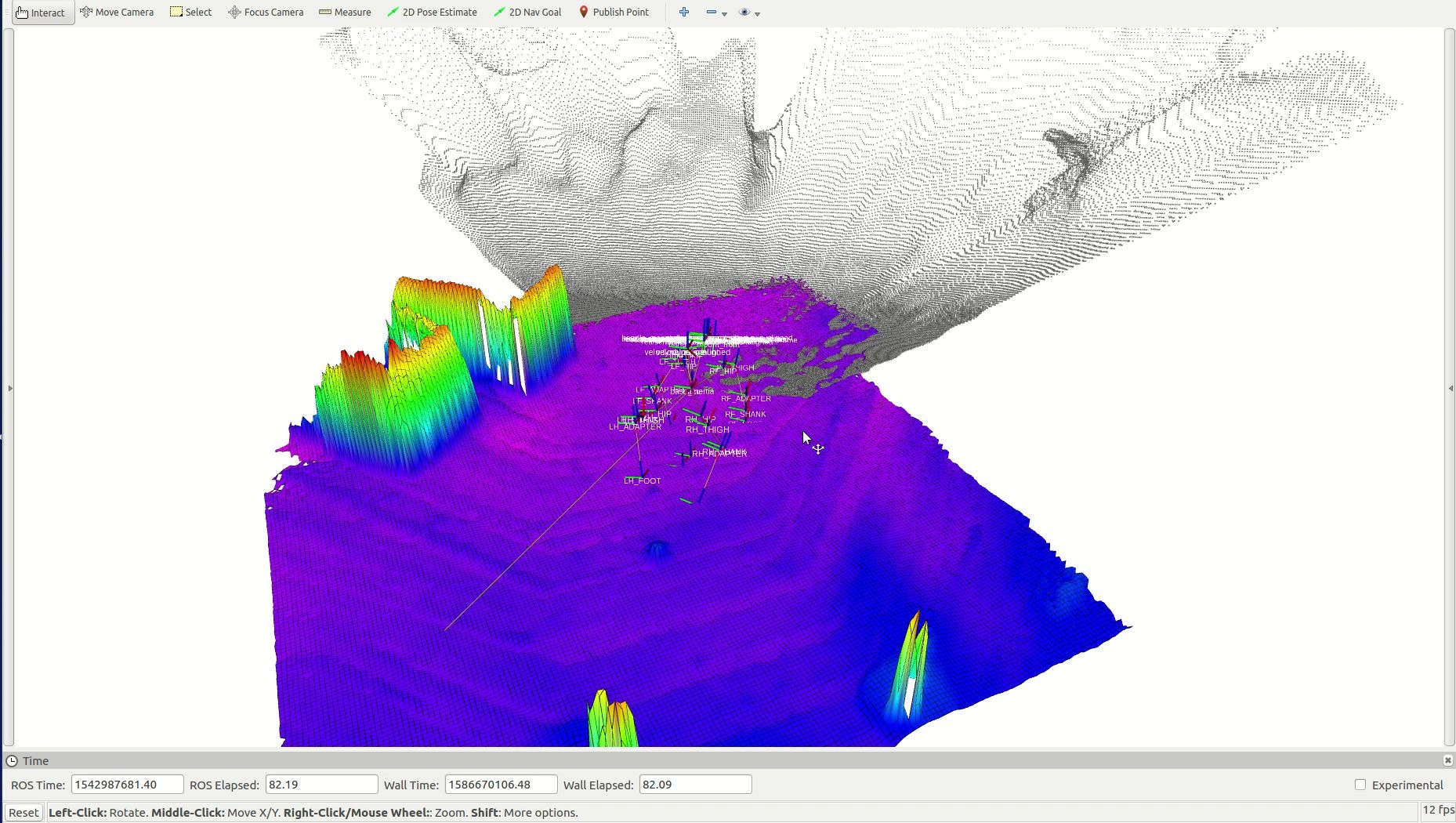
【开源项目分享】用于机器人崎岖地形导航的高程图创建演示
该项目是由苏黎世联邦理工学院(自治系统实验室和机器人系统实验室)开发,用于创建以机器人为中心的高程图,以实现崎岖地形的自主导航任务。 下载安装请看:https://github.com/ANYbotics/elevation_mapping 使用教程请看:https://blog.csdn.net/Travis_X/article/details/104148110 不定时分享些关于自动驾驶仿真平台Autoware的入门教程以及关于ROS机器人操作系统的教程,喜欢的欢迎关注、点赞,谢谢!
www.bilibili.com

