视频聚合搜索 - 壹搜网为您找到"
开源机器人github
"相关结果机器人圈重磅!OpenArmX VLA正式全球开源
机器人开发的小伙伴速来!基于ROS2的双臂协作机器人平台OpenArmX VLA全量开源上线,工业级生态直接拉满,这波技术福利直接拉满! 不管是运动控制、同构遥操这类基础开发,还是VR遥操、外骨骼遥操这类高阶玩法,GitHub上全套开源项目包直接自取,上手就能开发 ...
www.bilibili.com

高自由度人形机器人正式开源
www.iqiyi.com
【自制】低成本 Lerobot ESP32 主从遥操驱动(插电自动连接 无需电脑)
我做了一款基于ESP32的Leorbot驱动器,准确的说应该是支持所有舵机TTL总线机械臂,很稳定很好玩。 后面如果需要做简单的演示真的不需要准备电脑了。 具体功能如下: ① 适配性:无缝插入leorbot的后尾槽中替换原本的驱动板 ② 多种模式:单个模块可以设置Leader模式、Follower模式和一对多主臂模式 ③ 便捷性:主臂自动搜索附近的从臂,自动配对,直接进入主从控制状态 ④ 模块化:可以替换掉原版的驱动板,也可以串接出来控制 ⑤ 无线连接:无需被众多数据线干扰实现 ⑥ 拓展功能:网页远程
www.bilibili.com


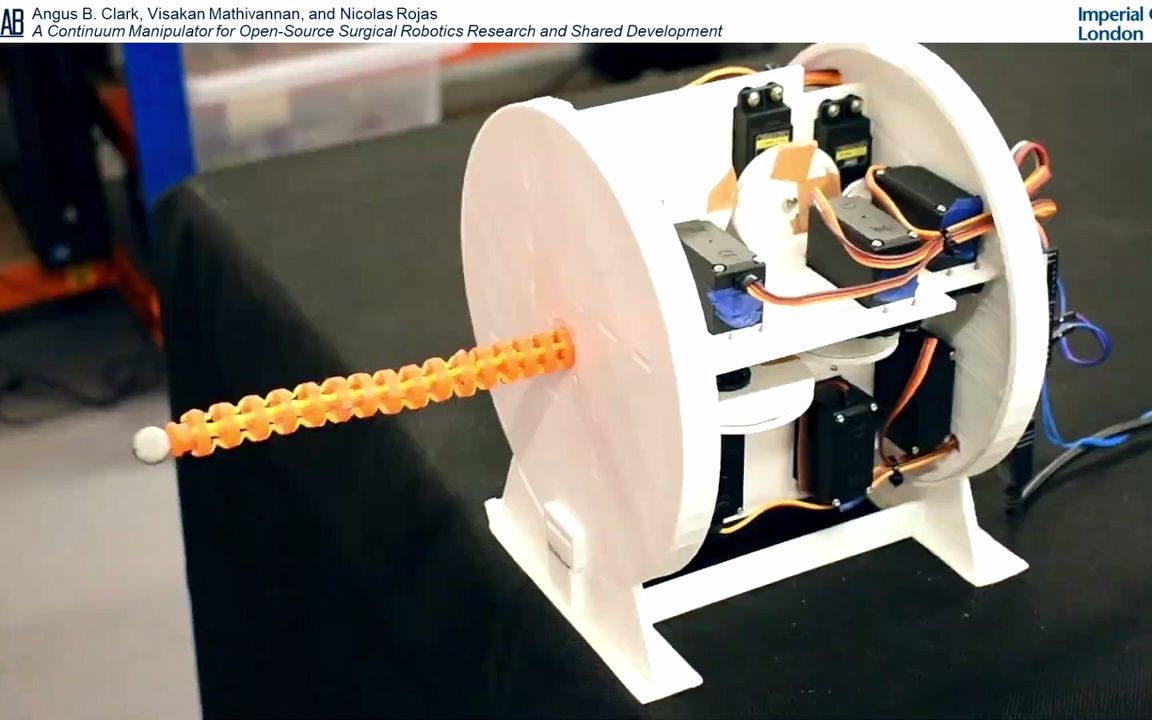
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
许多研究探索了连续体机器人手在微创手术中的应用,并成功展示了其灵活设计所提供的优势——一些解决方案已达到商业化和临床实践。然而,这种设计通常具有高度复杂性和封闭性,传统上限制了连续体机器人在整个研究领域的共享发展,从而影响了进一步的进展和开放挑战的解决方案。为了缩小这一差距,本文介绍了 ENDO,这是一种具有控制和驱动机制的开源3段连续机器人机械臂,其重点是简单性、可负担性和可访问性。该机器人系统由低成本的现成组件和快速原型制作方法制成,其实施信息(以及未来迭代的信息),包括 CAD 文件和源代码,可在开源医疗机器人上向公众提供Initiative 在 GitHub 上的存储库,控制库也可以直接从 Arduino 获得。在这里,介绍了机器人设计和控制的细节,通过实验评估其工作空间来验证功能,并讨论未来发展的可能路径。 论文:Clark, A. B., Mathivannan, V., Rojas, N. (2020). A continuum manipulator for open-source surgical robotics research and shared development. IEEE Transactions on Medical Robotics and Bionics, 3(1), 277-280. DOI: 10.1109/TMRB.2020.3041391 链接:https://ieeexplore.ieee.org/document/9273083 CAD文件和源代码Github:https://github.com/OpenSourceMedicalRobots
www.bilibili.com


