视频聚合搜索 - 壹搜网为您找到"
GitHub dataset
"相关结果
程序员宝库,开源社区GitHub到底该怎么玩 |如何玩转Github |Java/Python/C语言/C++开源项目聚集地
用一期视频跟大家交流一下程序员宝库GitHub到底该怎么使用的问题吧。大家有需求或问题都可以去公众号(CodeSheep)找程序羊提,有时间即会回复,多见谅哈!
www.bilibili.com


如何提高自己的代码能力以达到熟练使用pytorch? 上github, 关注lucid...
www.douyin.com
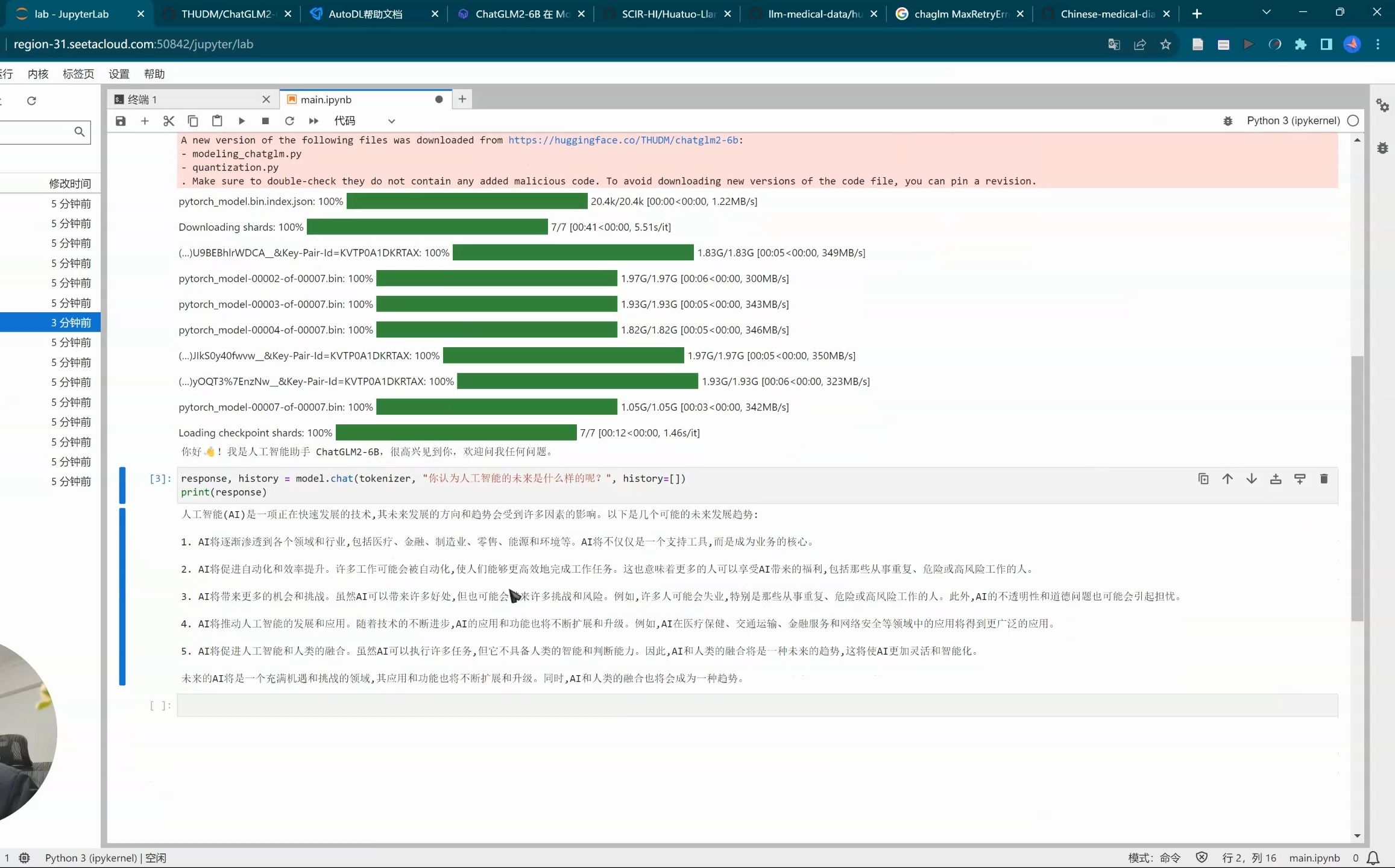
chatGLM2-6B-华驼数据集微调 中文医学指令微调 云服务器实现
基于chatGLM2-6B模型,使用草本(原名华驼)数据集微调,使用autodl平台进行复现和指令微调 主要参考资料: 医疗数据集:https://github.com/donote/llm-medical-data ChatGLM2-6B 在 ModelWhale 平台的部署与微调教程[官方教程]:https://www.heywhale.com/mw/project/64984a7b72ebe240516ae79c 本草[原名:华驼(HuaTuo)]:https://github.com/SCIR-HI/Huatuo-Llama-Med-Chinese
www.bilibili.com

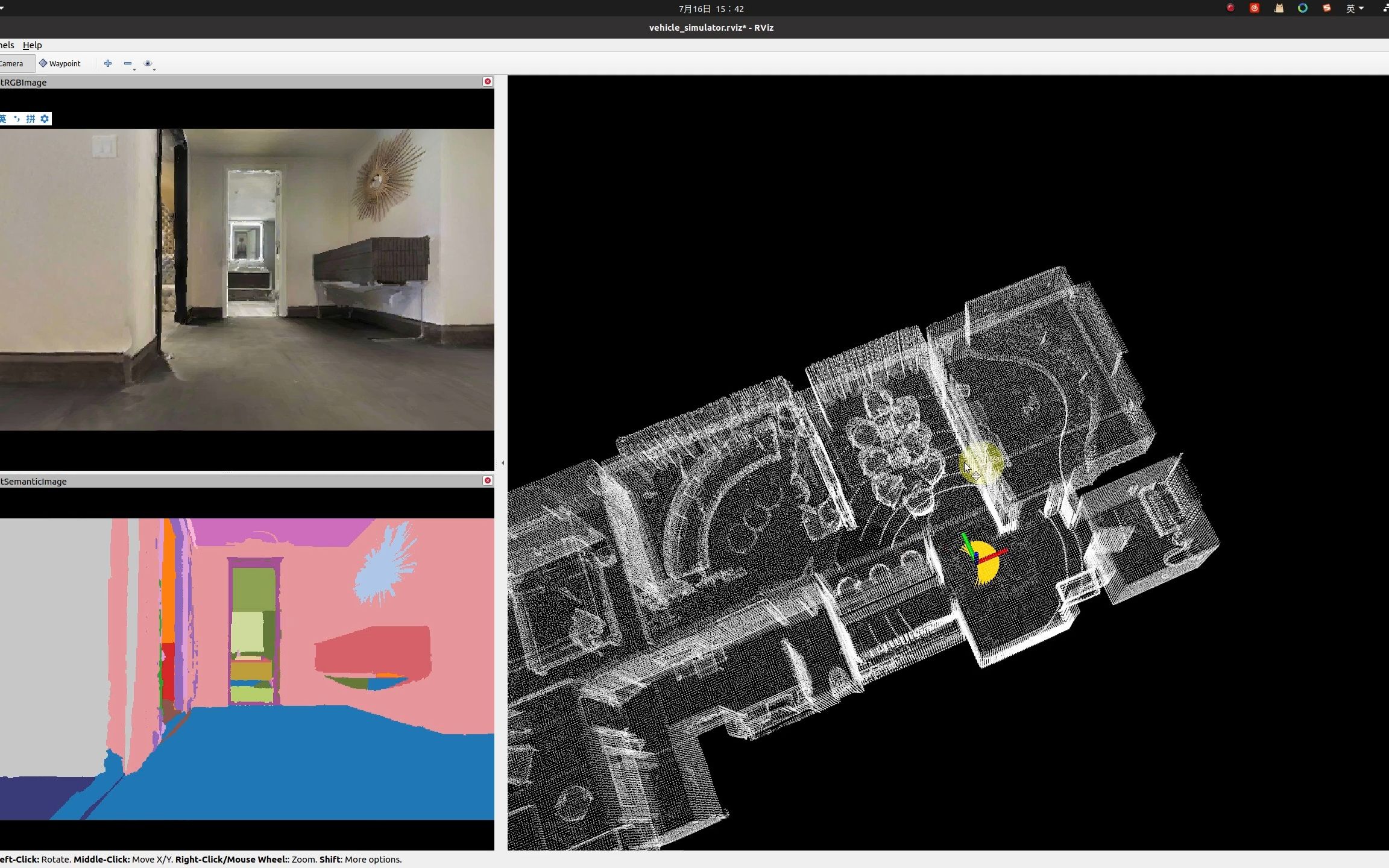
cmu自主探索局部规划器+habitat+matterport语义数据集
基于cmu自主探索和google开源的habitat做的仿真环境下的实时语义分割,可以通过语义数据集实时获取到每帧图像下的语义分割图像。 cmu自主探索源码:https://github.com/caochao39/tare_planner 系列文章:https://zhuanlan.zhihu.com/p/389756544 google ai habitat源码:https://github.com/facebookresearch/habitat-sim 这个视频将cmu的局部规划与habitat环境做了融合,并且加上了我个人的一些修改,做到了实时输出每帧图像下物体与空间的关系。大家如果需要的话可以评论,我过几天出一个教程 教程已经出来了,大家记得支持一下:https://blog.csdn.net/ws107845f/article/details/125843517?spm=1001.2014.3001.5502
www.bilibili.com

Github Action 最详细教学
前言 由于搜遍了全网都没有找到一个能用的且方便的 python 软件自动更新的解决方案 考虑到自动更新的框架原理并不复杂 所以自己动手开始造轮子 以便后续开发的qt应用都能方便的更新迭代 这是一个全网唯一最易用的 python 应用通用全自动更新框架 无需自建服务器 可跨平台使用 优点 支持 MacOS 系统应用更新 支持 Window 系统应用更新 无需服务器 使用 Github 自动构建软件和发布软件 客户端自动检查 Github 中发布的软件资源并自动更新 使用镜像对国内的网络进行优化
www.bilibili.com
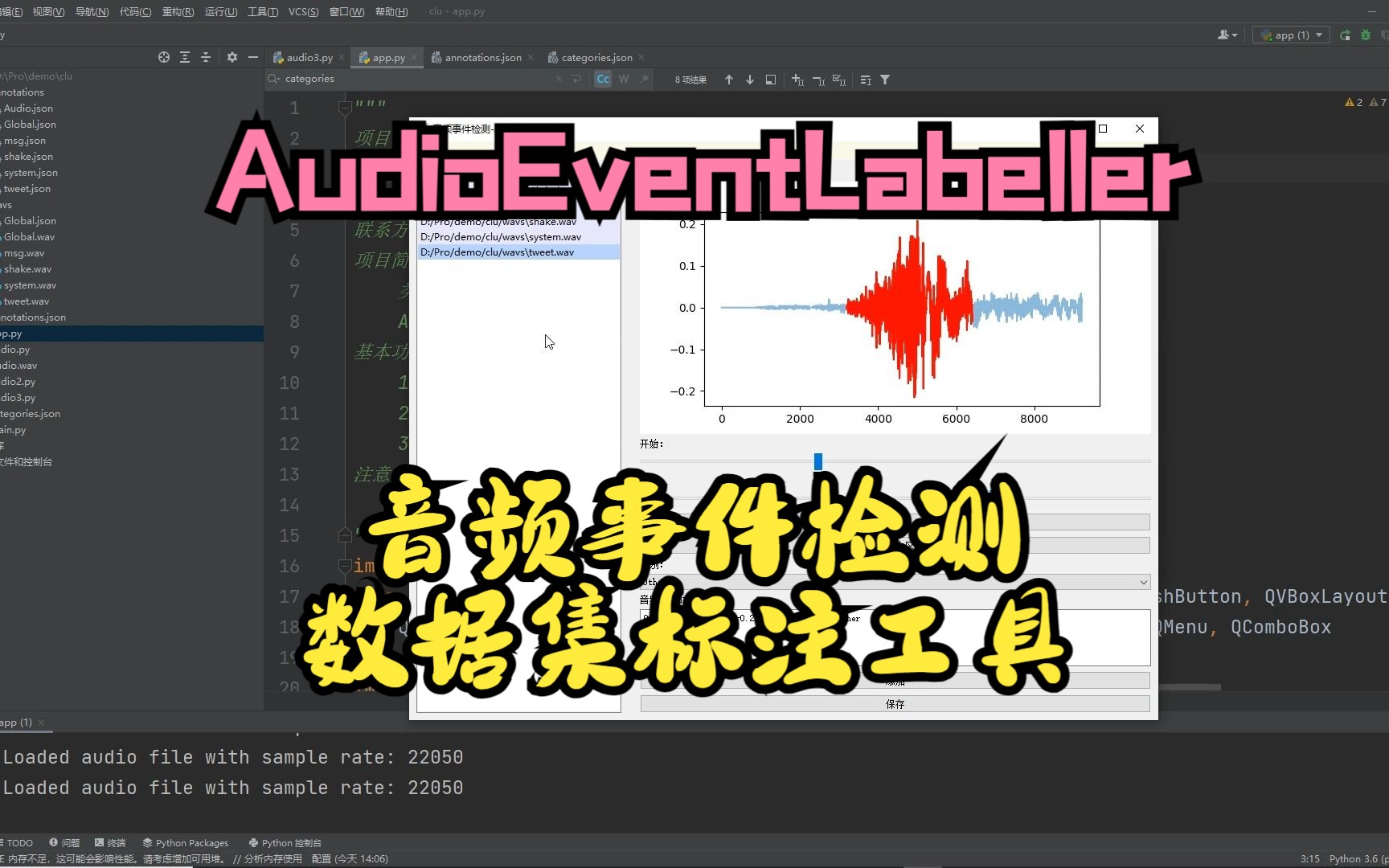
音频事件检测-数据集标注工具
项目名称:音频事件检测-数据集标注工具 开发时间:2023/6/18 项目作者:李化顺 联系方式:2357872806@qq.com(邮箱)、17719333702(微信) 项目简介: 类似目标检测数据集标注工具Labelme AudioEventLabeller用于音频事件数据集标注 基本功能: 1.支持单文件导入,也支持文件夹导入 2.视听结合的方式,动动鼠标即可完成标注 3.标注文件默认保存在./annotations文件夹 注意事项: 由于不同的数据集类别不同,请参考categories.json准备类别文件 开源地址: https://github.com/ZS520L/AudioEventLabeller ZS520L/AudioEventLabeller: EchoMarks: Dataset Annotation for Audio Event Detection (github.com)
www.bilibili.com

不是,怎么还有小白用梯子下模型上GitHub的?
软件名字:SteamCommunity302 解决Hosts劫持后git clone报错:git config --global http.sslVerify false 克隆时只要最新版:git clone [目标Repo] --depth=1
www.bilibili.com